

GCS Geospatial and Hobu, Inc. recently concluded support for National Geospatial-Intelligence Agency (NGA) Boosting Innovative GEOINT Research Broad Agency Announcement (BIG-R BAA) Topic 10 “Advanced 3D Analytic Tool Development, Enhancement, and Integration.” The team delivered an update to its browser-based Eptium tool that enables simultaneous co-exploitation of multiple cloud-native 3D datatypes. The team also delivered improvements to its Line-of-Sight (LOS) plugin to Applied Imagery’s Quick Terrain Modeler (QTM), alongside a novel approach to reporting viewsheds with multi-class output.
Enhancements to Eptium
Eptium is a browser-based Electronic Light Table (ELT) that supports analytics, visualization, and light exploitation of cloud optimized point clouds (COPC), cloud optimized GeoTIFFs (COG), and the Open Geospatial Consortium (OGC) 3D Tiles. The Hobu, Inc. team expanded Eptium’s analytical capabilities and responded to beta tester feedback while improving performance throughout, especially for point cloud and raster rendering.
Analytical Capabilities
Using Cesium’s API, Eptium can now generate rays between an observer and target point(s), collecting information on intersections along the sight line(s). These collected points are rendered and can be exported as a Polygon File Format (PLY). The 3D Viewshed tool works with any Cesium-renderable data types, including point clouds, 3D Models, and terrain mesh.
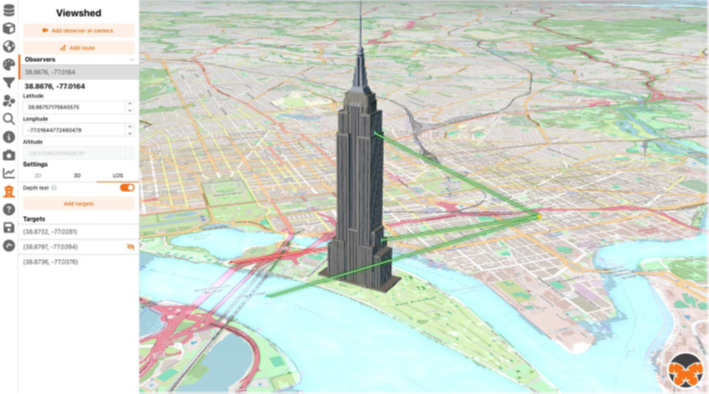
Image created by GCS Geospatial
A new extension was also added for streaming and rendering large Spatio Temporal Asset Catalog (STAC) collections through files. GeoParquet can be streamed and, through viewport awareness, supports the autoloading of resources cataloged in the STAC metadata.
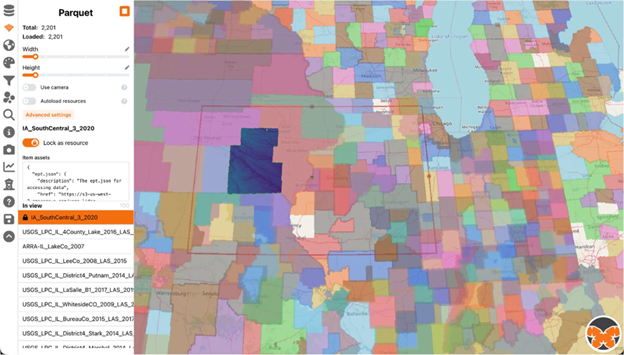
Image created by GCS Geospatial, DSM from USGS
Other improvements include:
- Creating new camera waypoint tool that allows users to create a fly-through of a scene by defining waypoints for a camera position.
- Adding support for loading remote object (OBJ) models.
- Enhancing metadata extraction for Cloud Optimized Point Cloud (COPC) and COG.
Tester Feedback
Eptium’s viewshed updates were driven by tester feedback and include the following:
- Intervisibility report updated to include the opacity of a region, where the greater the opacity of a cell, the greater percentage of observers that can see that cell.
- Users can now download viewed results.
- There is now just one observer type within Eptium capable of 2D viewshed, 3D viewshed, and point-to-point analysis.
Line-of-Sight (LOS) Enhancements
GCS Geospatial has updated their QTM Visibility (QVIS) plugin based on tester feedback. A full help system has also been added to the plugin to improve the user experience. The team has also developed an innovative approach to managing the uncertainty associated with visibility in point cloud data arising from vertical features.
QVIS Updates
The GCS team added a slight variant to the pre-existing “Compute Look Angle Using TLE” function. In this new function, “Compute Incremental Look Angle Using Two-line Element (TLE)“, users provide a start and end date-time along with the time interval (in minutes) between calculations to display how shadows and visibility may change over time. The function also allows users to control the lighting interval update (in seconds), along with media controls such as play/pause, previous, and forward.
The “Report Visible GPS Satellites” has been updated to require the user to download and provide their own TLE data for calculations. This is to support disconnected operations but also stems from the fact that our previous use of CelesTrak returned only the most recent TLE data thus far prohibited point-in-time analysis. Other updates include:
- Elevation angle required for visibility now defaults to 0 degrees; user can set custom value.
- Users will be notified of TLE data that is greater than three days from the requested date-time.
- Results can also be filtered by the Global Navigation Satellite System GNSS constellation.
Multi-class Viewshed
The combined GCS/Hobu team has made further performance improvements and capability advancements to the gdal_algorithm that supports a new, multi-class output when an auxiliary standard deviation raster is provided. Traditional viewshed algorithms produce binary outputs, either “visible” or “not visible.” Our new gdal_viewshed algorithm now also optionally produces a label of “potentially visible” by utilizing a dual-plane approach to update the visibility plane when the standard deviation of elevation is low and update the potentially visible plane in areas where the uncertainty is high. The update to the Geospatial Data Abstraction Library (GDAL) is currently in the master branch of GDAL and is slated for release this spring with version 3.13.
When comparing this new viewshed to terrestrial laser scans (TLS) of the same scene, we observe that the recall of visible pixels is improved. Unfortunately, this comes at the expense of precision, i.e., false positives are now marked as visible. To address this, GCS developed a data-driven refinement approach that relies on a pre-trained logistic regression model using the cumulative standard deviation from the observer position as the independent variable. The resulting binary mask is intersected with the new, multi-class output to reject “potentially visible” pixels with high accumulated uncertainty. This approach maximizes the F1-Score, indicating a better balance of precision and recall.
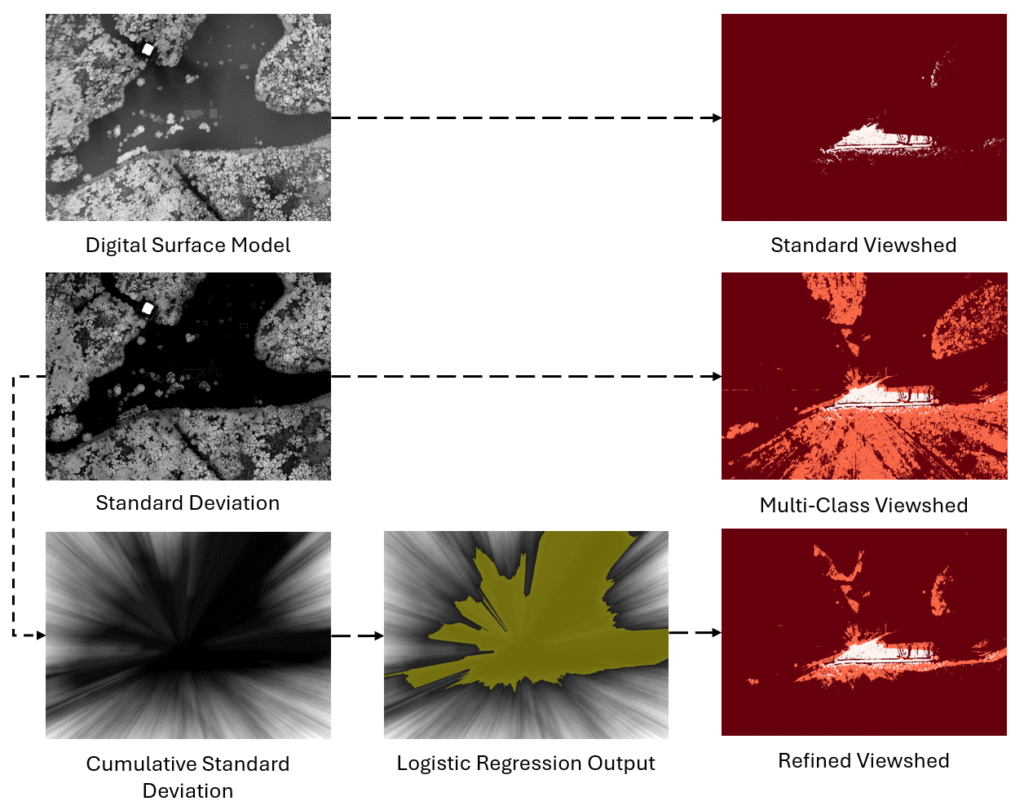
Images created by GCS Geospatial, DSM from USGS
Conclusion
Together, these efforts reflect a focused push to mature cloud-native 3D analytics and move beyond traditional, binary interpretations of visibility. By pairing scalable web-based exploitation in Eptium with uncertainty-aware LOS and viewshed research in QVIS and GDAL, the team delivered practical capabilities that improve analyst insight while remaining grounded in operational feedback. This work lays a strong foundation for continued advancement of NGA’s 3D analytic ecosystem as data volumes grow, workflows migrate to the cloud, and analytic questions demand more nuanced, data-driven answers.
See https://gcsgeospatial.com/nga-3d-analytic-tools/ for more on our accomplishments from the base period of performance.